2021年2月10日19时52分,我国首次火星探测任务“天问一号”探测器实施火星捕获制动,发动机工作约15分钟后,探测器顺利进入近火点高度约400千米、周期约10个地球日、倾角约10º的大椭圆环火轨道,成为我国第一颗人造火星卫星,实现此次任务“绕、着、巡”目标的第一步,成功开启环绕火星模式。

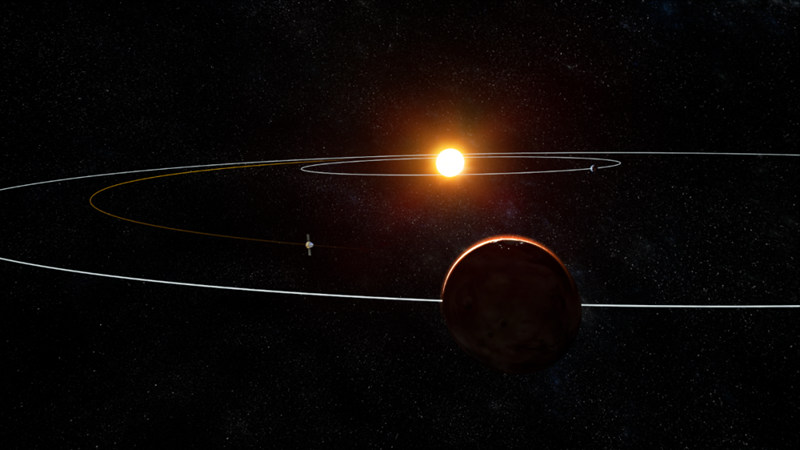
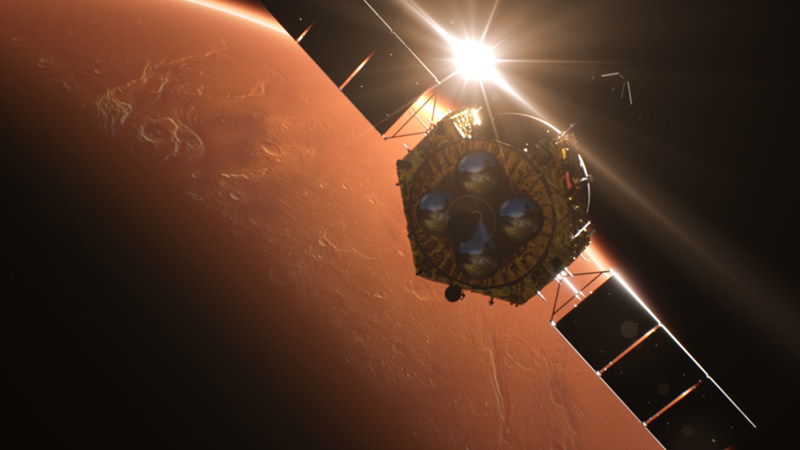
“天问一号”制动捕获高清效果图
后续天问一号还将经过多次轨道调整,进入火星停泊轨道,开展预选着陆区探测,计划于2021年5月至6月择机实施火星着陆,开展巡视探测。
此次“天问一号”火星捕获制动的成功,标志着我国首次火星探测任务“绕、落、巡”三大目标中的“环绕”目标顺利达成,为后续着陆、巡视任务的实施奠定了基础。
什么是火星捕获制动?
火星捕获制动是指探测器在抵近火星时,通过主发动机长时间点火,使得在行星际空间高速飞行的探测器大速度增量减速,从而能够被火星引力场捕获,进入绕火轨道。作为火星探测任务中技术风险最高、技术难度最大的环节之一,制动捕获的机会是唯一的,关系着整个工程任务的成败。
捕获过程中,火星环绕器需要准确地进行点火制动,只有点火时机和时长都分秒不差,才能形成理想的目标捕获轨道。
此次火星探测任务捕获时,探测器的目标轨道距离火星最近处仅400千米,一不留神就会撞击火星或飞离火星。地面测控系统的深空测控网通过接收探测器持续发射的高稳定度无线电信号,经过连续计算获得高精度的轨道数据,从而确保探测器能够在预定时间、预定高度顺利进入捕获走廊,实施变轨动作。
在捕获制动过程中,“天问一号”面临诸多挑战。由于捕获制动时探测器距离地球1.92亿千米,单向通信时延达到了10.7分钟,地面无法对整个过程进行实时监控,只能依靠探测器自主执行捕获策略。
自2020年7月23日发射以来,研制团队已持续开展202天在轨飞行控制任务,完成四次中途修正和一次深空机动,开展了各种自检和功能验证工作,对探测器的测控通信能力、能源保障能力、自主管理能力等进行了测试,确保捕获制动过程涉及的功能、性能得到充分检验。
这脚“火星刹车”,厉害!
制动捕获,简单来说就是通过发动机推力减速控制,来降低探测器的速度,使其能够被目标星体的引力所捕获,这一动作也被形象地称为“踩刹车”。但到底如何“踩刹车”?面对这一难题,“天问一号”交出了一份高分答卷。
开车的人都知道,在高速公路下匝道需要让车速降下来才能安全过弯。对于以28千米每秒高速靠近火星的探测器来说,要想被火星引力捕获,也必须在“捕获窗口”对应的轨道弧段,精准、自主、可靠地完成“刹车”。理论上,给探测器一个反向推力,即可把它的速度降下来。但在工程实现过程中,仍会遇到不少问题。
火星探测器配置了1台3000牛的轨道控制发动机,进行引力捕获时的制动减速控制。火星引力捕获窗口有限,要求探测器在10分钟内将速度降低约1千米每秒。过程中,探测器必须完全依靠自己完成发动机点火和关机,克服发动机点火期间的扰动,实现点火方向和点火时长的精确控制。
“在失去地面实时测控的环境下,我们只有通过方案设计,充分考虑发动机推力存在偏差、探测器质心不断变化等情况,全自主执行精确轨道控制;再通过多因素组合的测试和仿真分析,让控制方案更加可靠。”中国航天科技集团八院环绕器副总设计师朱庆华说。
火星探测任务背后的青岛力量
继“嫦娥五号”任务之后,青岛理工大学复杂网络与可视化研究所又为“天问一号”火星探测任务保驾护航。截至1月3日6时,“天问一号”探测器已经在轨飞行163天,飞行里程突破4亿公里,距离地球约1.3亿公里,距离火星约830万公里,飞行状态良好。按计划,探测器将在一个多月后实施近火制动,进入环火轨道,准备着陆火星。
青岛理工大学复杂网络与可视化研究所航天可视化团队多年来研发的空间实时三维可视化技术,在北京航天飞行控制中心为“天问一号”探测器的飞行控制与指挥保驾护航,相关系统运行正常。
据悉,航天可视化团队此前先后参与并圆满完成多项深空探测、载人航天等国家重大航天工程实战任务,主要包括探月工程嫦娥二号、三号、四号、五号任务的可视化飞行控制指挥与遥操作操控任务,载人航天工程天宫一号与神舟八号、九号、十号,天宫二号与神舟十一号交会对接任务的可视化飞行控制指挥任务。
另据2020年7月24日的报道,青岛科技大学也是参与火星探测任务的单位,他们承担了该项目的子课题——“行星表面特征提取跟踪与快速运动估计方法”,主要针对火星着陆末端,利用地表图像进行特征提取跟踪并进行视觉自主导航而开展的一系列研究工作。
“我们学校的自主导航与智能控制研究所2003年就已经成立,主要做探测器自主导航方面的工作,是国内较早研究自主导航的高校单位。”青岛科技大学自动化与电子工程学院教授邵巍说,此前的研究基础让他们有了足够的信心完成这次国家重大项目,而在这个领域已经研究10余年的邵巍对自己也信心十足。
邵巍介绍,青科大承担的子课题是完成星际自主、精确、安全着陆任务要解决的关键一环。特征提取匹配算法能否进行稳定、连续跟踪及其运行速度直接关系到自主导航的可行性、精度与可靠性。另一方面,行星着陆过程中动力学环境的不确知、强非线性以及相对运动估计的累积误差,导致实时高精度导航极为困难。
邵巍介绍他们研究的是探测器的着陆段自主导航算法,探测器上面有处理器,里面运行着多种程序。当着陆器的防热罩抛掉后,光学相机开始工作,在下降着陆段探测器利用光学相机对火星表面进行拍照以获取火星表面的瞬时图像,并对火星表面的特征点、陨石坑、山脊、沟壑等特征进行提取与跟踪。
探测器根据这些特征作为导航陆标,对自己的位置、速度、姿态进行估计,从而避开大的石头、陨石坑,选择平坦的地面降落。随着探测器高度下降,光学相机拍到的影像清晰度增加,探测器进而能够识别更小的石块,从而进行标记和规避,最终寻找到最完美的降落地。就像驾驶员开车需要看交通指示牌一样,才能够知道自己在哪,否则就可能迷路,到不了目的地。



 【尝鲜】泊里大集美食多 烩大饼一锅煮天下
【尝鲜】泊里大集美食多 烩大饼一锅煮天下 冬天里的春消息 蓝莓花盛开首批成熟蓝莓3月初即可上市
冬天里的春消息 蓝莓花盛开首批成熟蓝莓3月初即可上市 【城市大片】朝阳染红了浮山湾 几点鸥影在晨光中翩翩飞舞
【城市大片】朝阳染红了浮山湾 几点鸥影在晨光中翩翩飞舞 胶州湾洋河入海口 有一种蔚为壮观的景象叫海冰
胶州湾洋河入海口 有一种蔚为壮观的景象叫海冰 似梦似幻 严寒天气成就青岛前海沿另一番夕阳美景
似梦似幻 严寒天气成就青岛前海沿另一番夕阳美景 【大片】青岛海鸥的邻居 在荣成越冬的大天鹅
【大片】青岛海鸥的邻居 在荣成越冬的大天鹅 【青岛故事】青岛小伙收藏1935张火车票
【青岛故事】青岛小伙收藏1935张火车票 【青岛故事】青岛大姨练得一手剪纸绝活
【青岛故事】青岛大姨练得一手剪纸绝活